ARMxy equipped with IGH EtherCAT, enables nanosecond-level synchronization, highly reliable real-time control, and efficient PDO data management on RT-Linux, making it suitable for industrial automation and motion control scenarios.
Core Functions of the IGH EtherCAT Master
The EtherCAT Master is the central controller of the entire EtherCAT network and the only device that actively initiates communication. It organizes data flow, manages device status, and ensures precise synchronization across all slave devices.
Its core responsibilities include:
Frame Generation and Processing
-
The master generates and transmits EtherCAT frames.
-
Each slave reads/writes its assigned data section as the frame passes through.
-
Once the frame returns to the master, the master processes all input data and delivers it to the upper-layer application.
System Clock and Synchronization
-
The master provides the global clock for the EtherCAT network.
-
Through the Distributed Clocks (DC) mechanism, it aligns all slave clocks.
-
Enables nanosecond-level synchronization across hundreds or thousands of devices.
PDO (Process Data) Mapping Management
-
The master defines and manages the PDO mapping table.
-
It maps all slave input/output data into designated memory locations.
-
For user applications, reading/writing process data becomes as simple as accessing local memory.
State Machine Control
The master handles the standard EtherCAT network state transitions:
Init → Pre-Operational → Safe-Operational → Operational
Cyclic process data communication is only possible in the Operational state.
Slave Identification, Configuration, and Diagnostics
-
The master reads each slave’s ESI file to identify device type and capabilities.
-
Automatically configures Distributed Clocks, Sync Managers, and FMMU.
-
Continuously monitors network health and diagnoses issues such as slave loss, communication timeout, and watchdog errors.
Using IGH EtherCAT Master on ARMxy
Currently, the main IGH EtherCAT Master versions include:
ARM XY supports both versions and can be ported to any other versions as required.
The following example uses a pre-cross-compiled 1.6.8 master.
Real-Time Linux Required
Taking the TI Sitara AM62x platform BL350 series as an example:
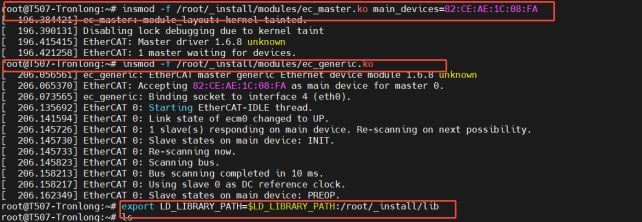
load the compiled master driver module and network card driver module into the kernel respectively, using the MAC address of the eth1 network card. Note the loading order. Then set the library environment variables. If the libraries are already placed in a system environment variable directory such as /usr/lib, this step can be omitted. Since the device has been connected in advance, slave 0 has been detected and is in the PREOP state. The user needs to perform PDO process data allocation operations according to the ESI file.
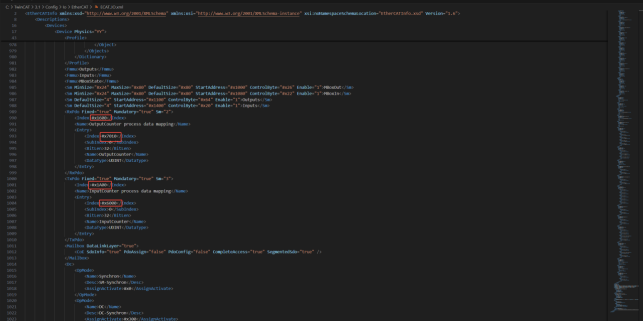
Based on the twincCAT ESI configuration file of the slave station, the igh ethercat interface can be called.
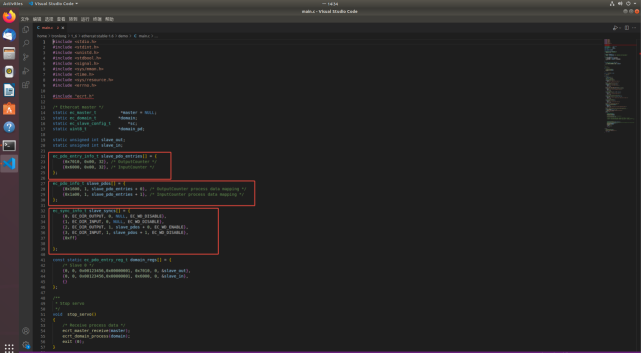
Configure PDO to be consistent with the ESI file.
Summary
With IGH EtherCAT Master, ARMxy provides:
-
High real-time performance (RT-Linux + EtherCAT)
-
Nanosecond-level multi-axis synchronization
-
Efficient PDO memory mapping
-
Industrial-grade reliability
-
Ideal for robotics, motion control, PLC systems, servo control, and automation equipment































